

了解ConcurrentHashMap和Hashtable的一些异同,源码、以及拓展点。
转载:https://crossoverjie.top/2018/07/23/java-senior/ConcurrentHashMap/
转载:https://juejin.im/post/6844904023003250701
HashMap
众所周知 HashMap 底层是基于 数组 + 链表 组成的,不过在 jdk1.7 和 1.8 中具体实现稍有不同。
Base 1.7
1.7 中的数据结构图:
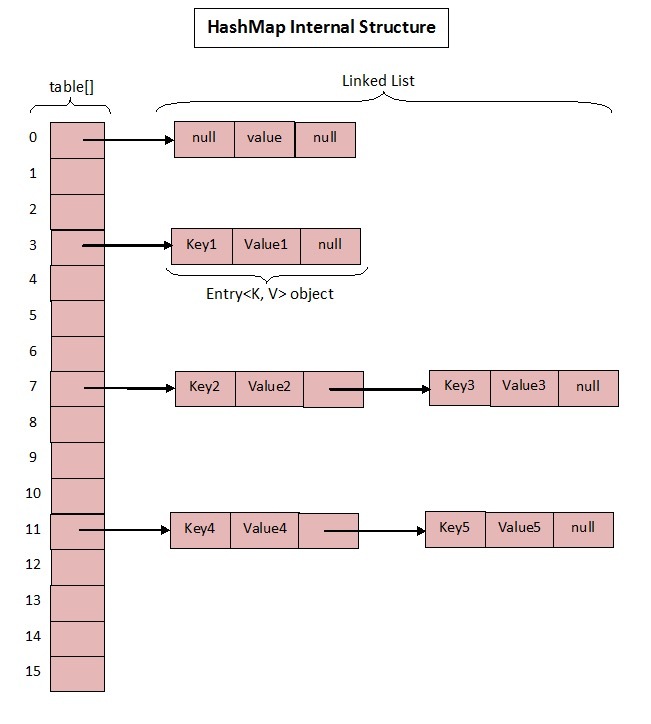
先来看看 1.7 中的实现。
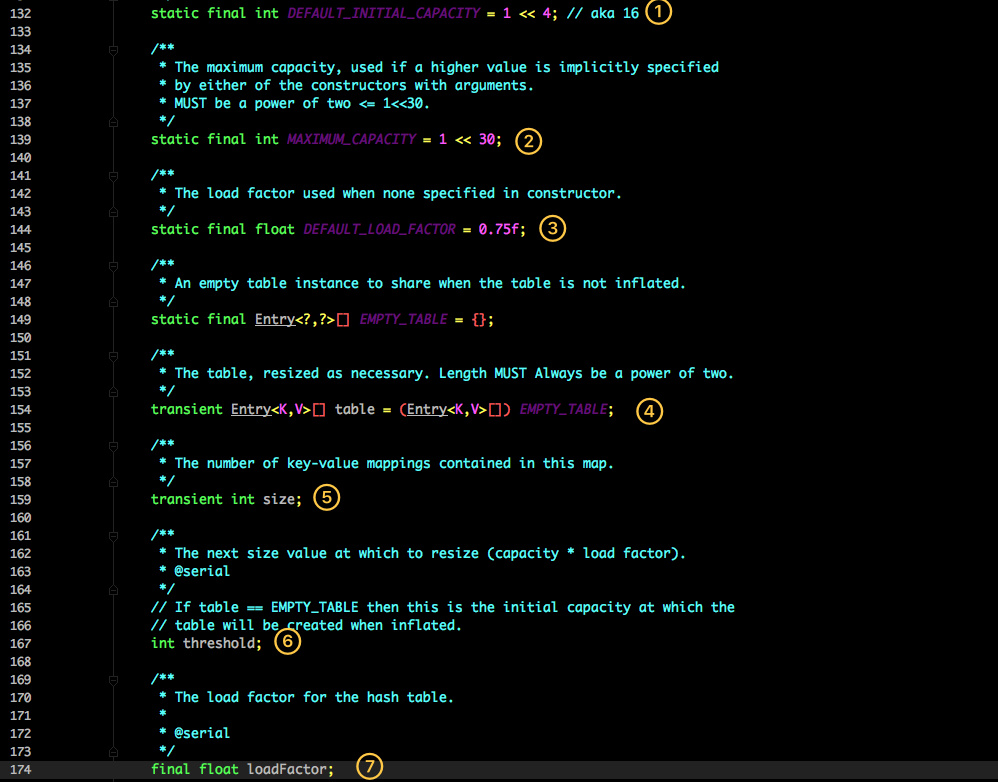
这是 HashMap 中比较核心的几个成员变量;看看分别是什么意思?
- 初始化桶大小,因为底层是数组,所以这是数组默认的大小。
- 桶最大值。
- 默认的负载因子(0.75)
table真正存放数据的数组。Map存放数量的大小。- 桶大小,可在初始化时显式指定。
- 负载因子,可在初始化时显式指定。
重点解释下负载因子:
由于给定的 HashMap 的容量大小是固定的,比如默认初始化:
1 | public HashMap() { |
给定的默认容量为 16,负载因子为 0.75。Map 在使用过程中不断的往里面存放数据,当数量达到了 16 * 0.75 = 12 就需要将当前 16 的容量进行扩容,而扩容这个过程涉及到 rehash、复制数据等操作,所以非常消耗性能。
因此通常建议能提前预估 HashMap 的大小最好,尽量的减少扩容带来的性能损耗。
根据代码可以看到其实真正存放数据的是
1 | transient Entry<K,V>[] table = (Entry<K,V>[]) EMPTY_TABLE; |
这个数组,那么它又是如何定义的呢?
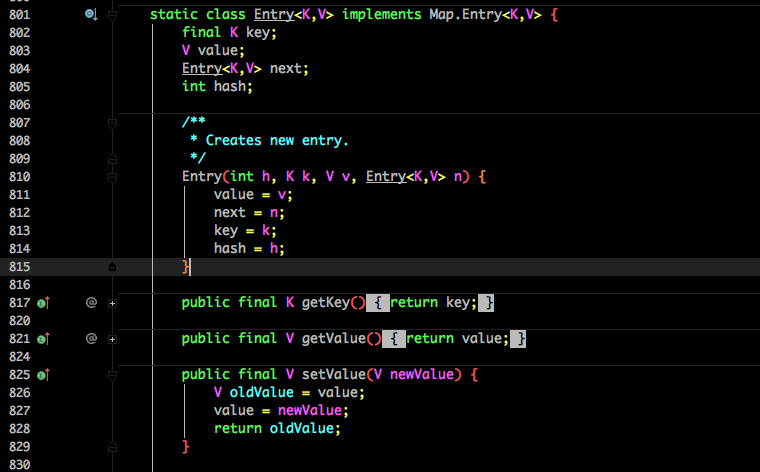
Entry 是 HashMap 中的一个内部类,从他的成员变量很容易看出:
- key 就是写入时的键。
- value 自然就是值。
- 开始的时候就提到 HashMap 是由数组和链表组成,所以这个 next 就是用于实现链表结构。
- hash 存放的是当前 key 的 hashcode。
知晓了基本结构,那来看看其中重要的写入、获取函数:
put 方法
1 | public V put(K key, V value) { |
- 判断当前数组是否需要初始化。
- 如果 key 为空,则 put 一个空值进去。
- 根据 key 计算出 hashcode。
- 根据计算出的 hashcode 定位出所在桶。
- 如果桶是一个链表则需要遍历判断里面的 hashcode、key 是否和传入 key 相等,如果相等则进行覆盖,并返回原来的值。
- 如果桶是空的,说明当前位置没有数据存入;新增一个 Entry 对象写入当前位置。
1 | void addEntry(int hash, K key, V value, int bucketIndex) { |
当调用 addEntry 写入 Entry 时需要判断是否需要扩容。
如果需要就进行两倍扩充,并将当前的 key 重新 hash 并定位。
而在 createEntry 中会将当前位置的桶传入到新建的桶中,如果当前桶有值就会在位置形成链表。
get 方法
再来看看 get 函数:
1 | public V get(Object key) { |
- 首先也是根据 key 计算出 hashcode,然后定位到具体的桶中。
- 判断该位置是否为链表。
- 不是链表就根据
key、key 的 hashcode是否相等来返回值。 - 为链表则需要遍历直到 key 及 hashcode 相等时候就返回值。
- 啥都没取到就直接返回 null 。
Base 1.8
不知道 1.7 的实现大家看出需要优化的点没有?
其实一个很明显的地方就是:
当 Hash 冲突严重时,在桶上形成的链表会变的越来越长,这样在查询时的效率就会越来越低;时间复杂度为
O(N)。
因此 1.8 中重点优化了这个查询效率。
1.8 HashMap 结构图:
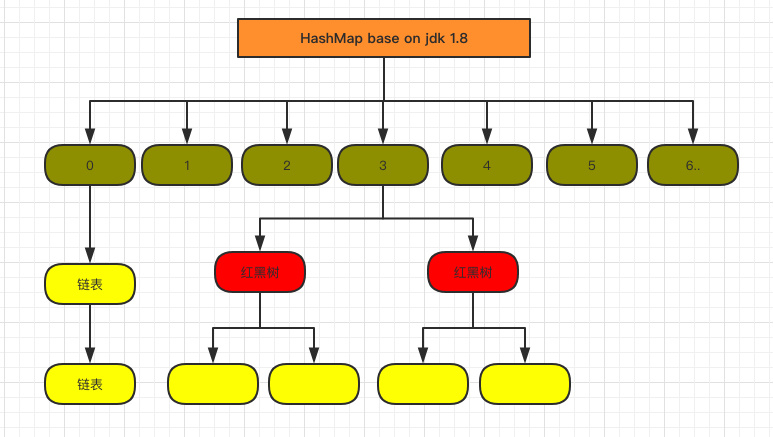
先来看看几个核心的成员变量:
1 | static final int DEFAULT_INITIAL_CAPACITY = 1 << 4; // aka 16 |
和 1.7 大体上都差不多,还是有几个重要的区别:
TREEIFY_THRESHOLD用于判断是否需要将链表转换为红黑树的阈值。- HashEntry 修改为 Node。
Node 的核心组成其实也是和 1.7 中的 HashEntry 一样,存放的都是 key value hashcode next 等数据。
再来看看核心方法。
put 方法
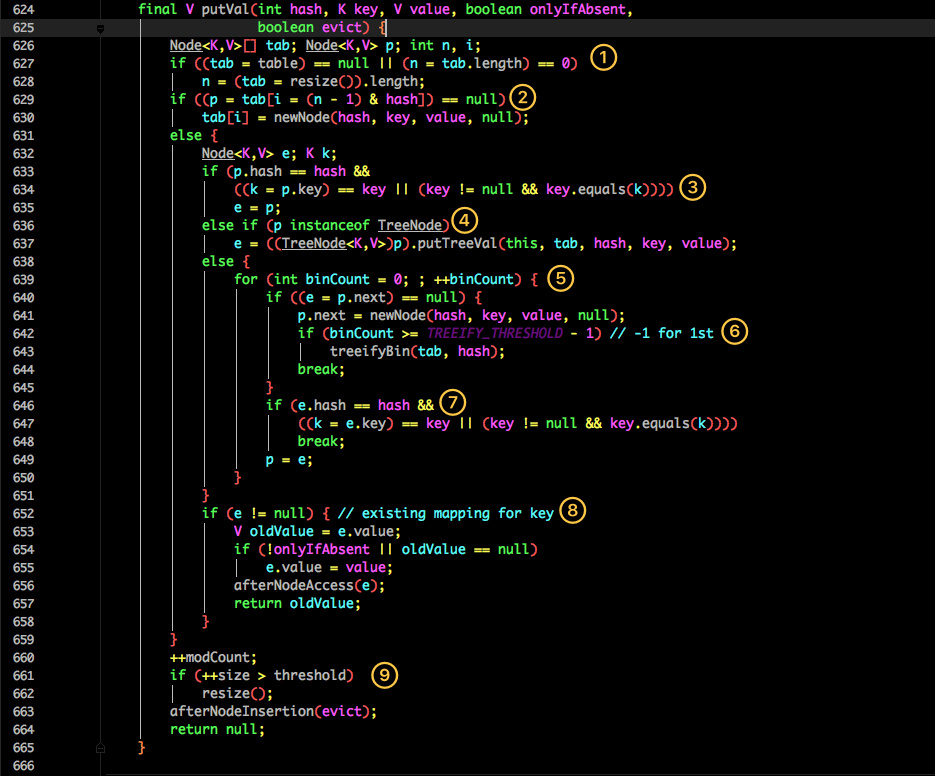
看似要比 1.7 的复杂,我们一步步拆解:
- 判断当前桶是否为空,空的就需要初始化(resize 中会判断是否进行初始化)。
- 根据当前 key 的 hashcode 定位到具体的桶中并判断是否为空,为空表明没有 Hash 冲突就直接在当前位置创建一个新桶即可。
- 如果当前桶有值( Hash 冲突),那么就要比较当前桶中的
key、key 的 hashcode与写入的 key 是否相等,相等就赋值给e,在第 8 步的时候会统一进行赋值及返回。 - 如果当前桶为红黑树,那就要按照红黑树的方式写入数据。
- 如果是个链表,就需要将当前的 key、value 封装成一个新节点写入到当前桶的后面(形成链表)。
- 接着判断当前链表的大小是否大于预设的阈值,大于时就要转换为红黑树。
- 如果在遍历过程中找到 key 相同时直接退出遍历。
- 如果
e != null就相当于存在相同的 key,那就需要将值覆盖。 - 最后判断是否需要进行扩容。
get 方法
1 | public V get(Object key) { |
get 方法看起来就要简单许多了。
- 首先将 key hash 之后取得所定位的桶。
- 如果桶为空则直接返回 null 。
- 否则判断桶的第一个位置(有可能是链表、红黑树)的 key 是否为查询的 key,是就直接返回 value。
- 如果第一个不匹配,则判断它的下一个是红黑树还是链表。
- 红黑树就按照树的查找方式返回值。
- 不然就按照链表的方式遍历匹配返回值。
从这两个核心方法(get/put)可以看出 1.8 中对大链表做了优化,修改为红黑树之后查询效率直接提高到了 O(logn)。
但是 HashMap 原有的问题也都存在,比如在并发场景下使用时容易出现死循环。
1 | final HashMap<String, String> map = new HashMap<String, String>(); |
但是为什么呢?简单分析下。
看过上文的还记得在 HashMap 扩容的时候会调用 resize() 方法,就是这里的并发操作容易在一个桶上形成环形链表;这样当获取一个不存在的 key 时,计算出的 index 正好是环形链表的下标就会出现死循环。
HashMap&Hashtable
Hashmap中的链表大小超过八个时会自动转化为红黑树,当删除小于六时重新变为链表,为啥呢?
根据泊松分布,在负载因子默认为0.75的时候,单个hash槽内元素个数为8的概率小于百万分之一,所以将7作为一个分水岭,等于7的时候不转换,大于等于8的时候才进行转换,小于等于6的时候就化为链表。
HashMap在多线程环境下存在线程安全问题,那你一般都是怎么处理这种情况的?
- 使用Collections.synchronizedMap(Map)创建线程安全的map集合;
- Hashtable
- ConcurrentHashMap
不过出于线程并发度的原因,我都会舍弃前两者使用最后的ConcurrentHashMap,他的性能和效率明显高于前两者。
哦,Collections.synchronizedMap是怎么实现线程安全的你有了解过么?
在SynchronizedMap内部维护了一个普通对象Map,还有排斥锁mutex,如图
1 | Collections.synchronizedMap(new HashMap<>(16)); |
我们在调用这个方法的时候就需要传入一个Map,可以看到有两个构造器,如果你传入了mutex参数,则将对象排斥锁赋值为传入的对象。
如果没有,则将对象排斥锁赋值为this,即调用synchronizedMap的对象,就是上面的Map。
创建出synchronizedMap之后,再操作map的时候,就会对方法上锁,如图全是🔐
回答得不错,能跟我聊一下Hashtable么?
跟HashMap相比Hashtable是线程安全的,适合在多线程的情况下使用,但是效率可不太乐观。
哦,你能说说他效率低的原因么?
嗯嗯面试官,我看过他的源码,他在对数据操作的时候都会上锁,所以效率比较低下。
除了这个你还能说出一些Hashtable 跟HashMap不一样点么?
Hashtable 是不允许键或值为 null 的,HashMap 的键值则都可以为 null。
呃我能打断你一下么?为啥 Hashtable 是不允许 KEY 和 VALUE 为 null, 而 HashMap 则可以呢?
因为Hashtable在我们put 空值的时候会直接抛空指针异常,但是HashMap却做了特殊处理。
1 | static final int hash(Object key) { |
但是你还是没说为啥Hashtable 是不允许键或值为 null 的,HashMap 的键值则都可以为 null?
这是因为Hashtable使用的是安全失败机制(fail-safe),这种机制会使你此次读到的数据不一定是最新的数据。
如果你使用null值,就会使得其无法判断对应的key是不存在还是为空,因为你无法再调用一次contain(key)来对key是否存在进行判断,ConcurrentHashMap同理。
好的你继续说不同点吧。
实现方式不同:Hashtable 继承了 Dictionary类,而 HashMap 继承的是 AbstractMap 类。
Dictionary 是 JDK 1.0 添加的,貌似没人用过这个,我也没用过。
初始化容量不同:HashMap 的初始容量为:16,Hashtable 初始容量为:11,两者的负载因子默认都是:0.75。
扩容机制不同:当现有容量大于总容量 * 负载因子时,HashMap 扩容规则为当前容量翻倍,Hashtable 扩容规则为当前容量翻倍 + 1。
迭代器不同:HashMap 中的 Iterator 迭代器是 fail-fast 的,而 Hashtable 的 Enumerator 不是 fail-fast 的。
所以,当其他线程改变了HashMap 的结构,如:增加、删除元素,将会抛出ConcurrentModificationException 异常,而 Hashtable 则不会。
fail-fast是啥?
快速失败(fail—fast)是java集合中的一种机制, 在用迭代器遍历一个集合对象时,如果遍历过程中对集合对象的内容进行了修改(增加、删除、修改),则会抛出Concurrent Modification Exception。
他的原理是啥?
迭代器在遍历时直接访问集合中的内容,并且在遍历过程中使用一个 modCount 变量。
集合在被遍历期间如果内容发生变化,就会改变modCount的值。
每当迭代器使用hashNext()/next()遍历下一个元素之前,都会检测modCount变量是否为expectedmodCount值,是的话就返回遍历;否则抛出异常,终止遍历。
Tip:这里异常的抛出条件是检测到 modCount!=expectedmodCount 这个条件。如果集合发生变化时修改modCount值刚好又设置为了expectedmodCount值,则异常不会抛出。
因此,不能依赖于这个异常是否抛出而进行并发操作的编程,这个异常只建议用于检测并发修改的bug。
说说他的场景?
java.util包下的集合类都是快速失败的,不能在多线程下发生并发修改(迭代过程中被修改)算是一种安全机制吧。
Tip:安全失败(fail—safe)大家也可以了解下,java.util.concurrent包下的容器都是安全失败,可以在多线程下并发使用,并发修改。
都说了他的并发度不够,性能很低,这个时候你都怎么处理的?
使用ConcurrentHashMap,他的并发的相比前两者好很多。
ConcurrentHashMap
哦?那你跟我说说他的数据结构吧,以及为啥他并发度这么高?
ConcurrentHashMap 底层是基于 数组 + 链表 组成的,不过在 jdk1.7 和 1.8 中具体实现稍有不同。
我先说一下他在1.7中的数据结构吧:
如图所示,是由 Segment 数组、HashEntry 组成,和 HashMap 一样,仍然是数组加链表。
Segment 是 ConcurrentHashMap 的一个内部类,主要的组成如下:
1 | static final class Segment<K,V> extends ReentrantLock implements Serializable { |
HashEntry跟HashMap差不多的,但是不同点是,他使用volatile去修饰了他的数据Value还有下一个节点next。
volatile的特性是啥?
- 保证了不同线程对这个变量进行操作时的可见性,即一个线程修改了某个变量的值,这新值对其他线程来说是立即可见的。(实现可见性)
- 禁止进行指令重排序。(实现有序性)
- volatile 只能保证对单次读/写的原子性。i++ 这种操作不能保证原子性。
我就不大篇幅介绍了,多线程章节我会说到的,大家知道用了之后安全了就对了。
那你能说说他并发度高的原因么?
原理上来说,ConcurrentHashMap 采用了分段锁技术,其中 Segment 继承于 ReentrantLock。
不会像 HashTable 那样不管是 put 还是 get 操作都需要做同步处理,理论上 ConcurrentHashMap 支持 CurrencyLevel (Segment 数组数量)的线程并发。
每当一个线程占用锁访问一个 Segment 时,不会影响到其他的 Segment。
就是说如果容量大小是16他的并发度就是16,可以同时允许16个线程操作16个Segment而且还是线程安全的。
1 | public V put(K key, V value) { |
他先定位到Segment,然后再进行put操作。
我们看看他的put源代码,你就知道他是怎么做到线程安全的了,关键句子我注释了。
1 | final V put(K key, int hash, V value, boolean onlyIfAbsent) { |
首先第一步的时候会尝试获取锁,如果获取失败肯定就有其他线程存在竞争,则利用 scanAndLockForPut() 自旋获取锁。
- 尝试自旋获取锁。
- 如果重试的次数达到了
MAX_SCAN_RETRIES则改为阻塞锁获取,保证能获取成功。
那他get的逻辑呢?
get 逻辑比较简单,只需要将 Key 通过 Hash 之后定位到具体的 Segment ,再通过一次 Hash 定位到具体的元素上。
由于 HashEntry 中的 value 属性是用 volatile 关键词修饰的,保证了内存可见性,所以每次获取时都是最新值。
ConcurrentHashMap 的 get 方法是非常高效的,因为整个过程都不需要加锁。
你有没有发现1.7虽然可以支持每个Segment并发访问,但是还是存在一些问题?
是的,因为基本上还是数组加链表的方式,我们去查询的时候,还得遍历链表,会导致效率很低,这个跟jdk1.7的HashMap是存在的一样问题,所以他在jdk1.8完全优化了。
那你再跟我聊聊jdk1.8他的数据结构是怎么样子的呢?
其中抛弃了原有的 Segment 分段锁,而采用了 CAS + synchronized 来保证并发安全性。
跟HashMap很像,也把之前的HashEntry改成了Node,但是作用不变,把值和next采用了volatile去修饰,保证了可见性,并且也引入了红黑树,在链表大于一定值的时候会转换(默认是8)。
同样的,你能跟我聊一下他值的存取操作么?以及是怎么保证线程安全的?
ConcurrentHashMap在进行put操作的还是比较复杂的,大致可以分为以下步骤:
- 根据 key 计算出 hashcode 。
- 判断是否需要进行初始化。
- 即为当前 key 定位出的 Node,如果为空表示当前位置可以写入数据,利用 CAS 尝试写入,失败则自旋保证成功。
- 如果当前位置的
hashcode == MOVED == -1,则需要进行扩容。 - 如果都不满足,则利用 synchronized 锁写入数据。
- 如果数量大于
TREEIFY_THRESHOLD则要转换为红黑树。
你在上面提到CAS是什么?自旋又是什么?
CAS 是乐观锁的一种实现方式,是一种轻量级锁,JUC 中很多工具类的实现就是基于 CAS 的。
CAS 操作的流程如下图所示,线程在读取数据时不进行加锁,在准备写回数据时,比较原值是否修改,若未被其他线程修改则写回,若已被修改,则重新执行读取流程。
这是一种乐观策略,认为并发操作并不总会发生。
还是不明白?那我再说明下,乐观锁在实际开发场景中非常常见,大家还是要去理解。
就比如我现在要修改数据库的一条数据,修改之前我先拿到他原来的值,然后在SQL里面还会加个判断,原来的值和我手上拿到的他的原来的值是否一样,一样我们就可以去修改了,不一样就证明被别的线程修改了你就return错误就好了。
SQL伪代码大概如下:
1 | update a set value = newValue where value = #{oldValue}//oldValue就是我们执行前查询出来的值 |
CAS就一定能保证数据没被别的线程修改过么?
并不是的,比如很经典的ABA问题,CAS就无法判断了。
什么是ABA?
就是说来了一个线程把值改回了B,又来了一个线程把值又改回了A,对于这个时候判断的线程,就发现他的值还是A,所以他就不知道这个值到底有没有被人改过,其实很多场景如果只追求最后结果正确,这是没关系的。
但是实际过程中还是需要记录修改过程的,比如资金修改什么的,你每次修改的都应该有记录,方便回溯。
那怎么解决ABA问题?
用版本号去保证就好了,就比如说,我在修改前去查询他原来的值的时候再带一个版本号,每次判断就连值和版本号一起判断,判断成功就给版本号加1。
1 | update a set value = newValue ,vision = vision + 1 where value = #{oldValue} and vision = #{vision} // 判断原来的值和版本号是否匹配,中间有别的线程修改,值可能相等,但是版本号100%不一样 |
除了版本号还有别的方法保证么?
其实有很多方式,比如时间戳也可以,查询的时候把时间戳一起查出来,对的上才修改并且更新值的时候一起修改更新时间,这样也能保证,方法很多但是跟版本号都是异曲同工之妙,看场景大家想怎么设计吧。
CAS性能很高,但是我知道synchronized性能可不咋地,为啥jdk1.8升级之后反而多了synchronized?
synchronized之前一直都是重量级的锁,但是后来java官方是对他进行过升级的,他现在采用的是锁升级的方式去做的。
针对 synchronized 获取锁的方式,JVM 使用了锁升级的优化方式,就是先使用偏向锁优先同一线程然后再次获取锁,如果失败,就升级为 CAS 轻量级锁,如果失败就会短暂自旋,防止线程被系统挂起。最后如果以上都失败就升级为重量级锁。
所以是一步步升级上去的,最初也是通过很多轻量级的方式锁定的。
🐂,那我们回归正题,ConcurrentHashMap的get操作又是怎么样子的呢?
- 根据计算出来的 hashcode 寻址,如果就在桶上那么直接返回值。
- 如果是红黑树那就按照树的方式获取值。
- 就不满足那就按照链表的方式遍历获取值。
小结:1.8 在 1.7 的数据结构上做了大的改动,采用红黑树之后可以保证查询效率(O(logn)),甚至取消了 ReentrantLock 改为了 synchronized,这样可以看出在新版的 JDK 中对 synchronized 优化是很到位的。
fail-fast & fail-safe
一:快速失败(fail—fast)
在用迭代器遍历一个集合对象时,如果遍历过程中对集合对象的内容进行了修改(增加、删除、修改),则会抛出Concurrent Modification Exception。
原理:迭代器在遍历时直接访问集合中的内容,并且在遍历过程中使用一个 modCount 变量。集合在被遍历期间如果内容发生变化,就会改变modCount的值。每当迭代器使用hashNext()/next()遍历下一个元素之前,都会检测modCount变量是否为expectedmodCount值,是的话就返回遍历;否则抛出异常,终止遍历。
注意:这里异常的抛出条件是检测到 modCount!=expectedmodCount 这个条件。如果集合发生变化时修改modCount值刚好又设置为了expectedmodCount值,则异常不会抛出。因此,不能依赖于这个异常是否抛出而进行并发操作的编程,这个异常只建议用于检测并发修改的bug。
场景:java.util包下的集合类都是快速失败的,不能在多线程下发生并发修改(迭代过程中被修改)。
二:安全失败(fail—safe)
采用安全失败机制的集合容器,在遍历时不是直接在集合内容上访问的,而是先复制原有集合内容,在拷贝的集合上进行遍历。
原理:由于迭代时是对原集合的拷贝进行遍历,所以在遍历过程中对原集合所作的修改并不能被迭代器检测到,所以不会触发Concurrent Modification Exception。
缺点:基于拷贝内容的优点是避免了Concurrent Modification Exception,但同样地,迭代器并不能访问到修改后的内容,即:迭代器遍历的是开始遍历那一刻拿到的集合拷贝,在遍历期间原集合发生的修改迭代器是不知道的。
场景:java.util.concurrent包下的容器都是安全失败,可以在多线程下并发使用,并发修改。
快速失败和安全失败是对迭代器而言的。 快速失败:当在迭代一个集合的时候,如果有另外一个线程在修改这个集合,就会抛出ConcurrentModification异常,java.util下都是快速失败。 安全失败:在迭代时候会在集合二层做一个拷贝,所以在修改集合上层元素不会影响下层。在java.util.concurrent下都是安全失败
总结
Hashtable&ConcurrentHashMap跟HashMap基本上就是一套连环组合,我在面试的时候经常能吹上很久,经常被面试官说:好了好了,我们继续下一个话题吧哈哈。
是的因为提到HashMap你肯定会聊到他的线程安全性这一点,那你总不能加锁一句话就搞定了吧,java的作者们也不想,所以人家写开发了对应的替代品,那就是线程安全的Hashtable&ConcurrentHashMap。
两者都有特点,但是线程安全场景还是后者用得多一点,原因我在文中已经大篇幅全方位的介绍了,这里就不再过多赘述了。
你们发现了面试就是一个个的坑,你说到啥面试官可能就怼到你啥,别问我为啥知道嘿嘿。
你知道不确定能不能为这场面试加分,但是不知道肯定是减分的,文中的快速失败(fail—fast)问到,那对应的安全失败(fail—safe)也是有可能知道的,我想读者很多都不知道吧,因为我问过很多仔哈哈。
还有提到CAS乐观锁,你要知道ABA,你要知道解决方案,因为在实际的开发场景真的不要太常用了,sync的锁升级你也要知道。
我没过多描述线程安全的太多东西,因为我都写了,以后更啥?对吧哈哈。
常见问题
- 谈谈你理解的 Hashtable,讲讲其中的 get put 过程。ConcurrentHashMap同问。
- 1.8 做了什么优化?
- 线程安全怎么做的?
- 不安全会导致哪些问题?
- 如何解决?有没有线程安全的并发容器?
- ConcurrentHashMap 是如何实现的?
- ConcurrentHashMap并发度为啥好这么多?
- 1.7、1.8 实现有何不同?为什么这么做?
- CAS是啥?
- ABA是啥?场景有哪些,怎么解决?
- synchronized底层原理是啥?
- synchronized锁升级策略
- 快速失败(fail—fast)是啥,应用场景有哪些?安全失败(fail—safe)同问。
- ……
加分项
在回答Hashtable和ConcurrentHashMap相关的面试题的时候,一定要知道他们是怎么保证线程安全的,那线程不安全一般都是发生在存取的过程中的,那get、put你肯定要知道。
HashMap是必问的那种,这两个经常会作为替补问题,不过也经常问,他们本身的机制其实都比较简单,特别是ConcurrentHashMap跟HashMap是很像的,只是是否线程安全这点不同。
提到线程安全那你就要知道相关的知识点了,比如说到CAS你一定要知道ABA的问题,提到synchronized那你要知道他的原理,他锁对象,方法、代码块,在底层是怎么实现的。
synchronized你还需要知道他的锁升级机制,以及他的兄弟ReentantLock,两者一个是jvm层面的一个是jdk层面的,还是有很大的区别的。
- 本文作者: zicair
- 本文链接: https://zicair.github.io/2020/09/01/ConcurrentHashMap-Hashtable/
- 版权声明: 本博客所有文章除特别声明外,均采用 MIT 许可协议。转载请注明出处!